
Lasten-Bot

Problem
Treppen steigen ist im hohen Alter sehr mühsam. Wenn dann noch das mitgeführte Gepäck hinzukommt, führt dies zu einem nicht endenden Kraftakt. Es gibt durchaus Situation wo selbst Personen, die nicht gehandicapped sind, eine zusätzliche Hilfe brauchen. Auf Baustellen müssen nicht selten sehr schwere und sperrige Gegenstände in den nächsten Stock gebracht werden. Der Lasten Bot kann diese Arbeit schnell und sicher erledigen. In der gleichen Zeit kann der Arbeiter andere Sachen erledigen. Dieser Vorteil ist in vielen anderen Arbeitsbereichen, wo ständig Gegenstände die Etage wechseln, eine sinnvolle Unterstützung. In Bibliotheken können diese Arbeiten von Lasten Bots verrichtet werden. Die Bots tragen die Bücher direkt zum Ziel, um sie dort einzusortieren. Der Bibliothekar kann sich mehr auf den Service konzentrieren. Ein weiterer Vorteil dieses Roboters, ist der individuelle Einsatz, unabhängig von der vorhandenen Architektur. Diese Roboter brauchen keine feste Installation. Sie sind somit ideal für denkmalgeschützte Bauten, wo Gegenstände über Treppen transportiert werden müssen.
Bestehende Lösungen










Anatomie
Der Roboter muss Treppen überwinden und dabei die Last schnell und sicher transportieren. Dabei ist zu überlegen welche Arten von Gliedmaßen vorteilhafter in ihrer Bewegung sind - z.B.:
- Beine (2, 4, 6, 8,
)
- Räder (2, 4, 6, 8,
)
- Ketten
- Kombination aus Rädern und Beinen
- Fliegen br> - Luftkissen
- Saugnäpfe>
- am Seil / Seilwinde
- auf Schienen
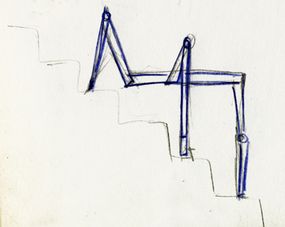
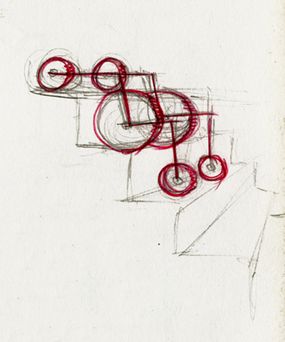
- Erste Überlegungen zu der Anatomie.

Der Natur abgeschaut.
Wenn wir zum Vergleich die Natur uns anschauen, so stellt man sofort fest, das es keine Räder gibt. Also scheint das Bein, das Rennen gemacht zu haben. Um dem Prinzip der Natur näher zu kommen, soll ein Abschnitt aus dem Buch (Bionik, Neue Technologien nach dem Vorbild der Natur, Prof. Dr. Werner Nachtigall, Kurt G. Blüchel), Aufschluss geben.



Wie macht es denn ein Mensch, wenn er schneller gehen will? Zunächst erhöht er die Schrittfrequenz. Er macht in der Minute einfach mehr Schritte. Dann kommt die Erhöhung der Schrittamplitude dazu: Er macht längere Schritte und erreicht damit größere Schrittweiten. Ganz ähnlich machen es die Insekten. Es scheint sich um ein durchgehendes Prinzip zu handeln: zuerst Frequenzerhöhung, dann Amplitudenerhöhung. Insekten laufen bei mittleren Geschwindigkeiten statisch sehr stabil. Jeweils mindestens drei Beine stützen den Körper, und der Schwerpunkt liegt immer etwa in der Mitte eines lagestabilen Dreiecks. So berühren beispielsweise die Spitzen des linken Vorderbeins, des rechten Mittelbeins und des linken Hinterbeins den Boden, während die drei anderen Beine vorschwingen, und das Ganze läuft dann spiegelbildlich ab. Man kann also von einem DoppelDreibein-Gang sprechen.
Erst als man »Sinnesor gane« an den Beinenden anbrachte, die den Anpressdruck und andere Parameter messen konnten, und als es Schaltungen gab, die diese Messdaten sehr schnell »online« verrechnen und den anderen Beinen mitteilen konnten, kam man zu stabilen Laufmustern.
Die Stabheuschrecke Carausius morosus trägt insektentypisch sechs Beine, die im Prinzip gleichartig aufgebaut sind. Die Stabheuschrecken-analoge Laufmaschine wurde nun so konstruiert, daß sie in der prinzipiellen Beingeometrie und Beinbewegung dem Stabheuschreckenbein nahekommt. Damit läuft die Bewegung im Prinzip wirklich ab wie an einem Insektenbein, und die Maschinenbauer haben bei der Arbeit festgestellt, daß im Vergleich mit mehreren Möglichkeiten das Insektenmodell die beste und steuertechnisch vernünftigste Variante darstellt.
Das knapp meterlange Gehwerkzeug wiegt insgesamt nur etwa 3 kg und kann im Dauerbetrieb eine Masse von etwa 10 kg, im Kurzzeitbetrieb maximal 18 kg tragen. Das Tragfähigkeitsverhältnis beträgt also maximal 6 : 1, immerhin eine beachtliche Leistung. Beim Insekt ist das Verhältnis wesentlich größer. Das liegt aber nicht so sehr an irgendwelchen Tricks der Natur, sondern schlicht an physikalischen Effekten der kleinen Dimensionen. Wäre die Ameise größer, wäre sie auch »relativ schwächer«.
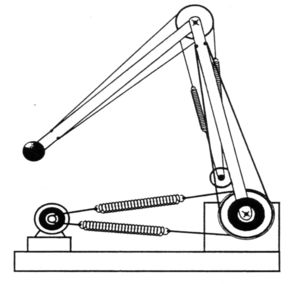
Konzept
Für die Bewältigung einer Treppe scheint mir ein Bewegungsapperat in Form von Beinen unverzichtbar. Der Grund dafür ist die Sicht in die Natur. Das Bein hat sich als optimales Fortbewegunsmittel in unwegsamen Gelände bewährt. Ich möchte eine Kombination aus Rad und Bein schaffen. Der Grund ist, das das Rad sich ebenso bewehrt hat aufgrund seiner radialen und sparsamen Eigenschaften.




Treppen-Bot - Funktionsmodelle
Mit Hilfe von Modellen ist es mir möglich die mechanischen und motorischen Eigenheiten meines Bewegungskonzeptes genauer zu analysieren.

Ist es möglich mit nur drei Beinen die sich um ihre eigene Achse drehen eine Standardtreppen mit einem Anstieg von 17cm / 29cm zu bewältigen?

Lego hat den Vorteil, das man schnell ein bewegliches Funktionsmodell bauen kann. Mit Hilfe einer Gif-Animation ist der Bewegungsablauf gut zu erkennen. Verbesserungen lassen sich nachvollziehen.

Ein 2D-Pappskelett bringt Einblick in die beweglichen Teile und notwendigen Gelenke, die nötig oder nicht. Manuelle Bewegungen werden veranschaulicht.