DER RITZELBOT
3. Form und Funktion des Ritzelbots
11.05.2007
Erste Skizzen


14.05.2007
Ritzelbot Version 1

Dieser Ritzelbot kann sich in zwei Zuständen fortbewegen. Beim Arbeiten rollt er energiesparend auf dem Boden. Trifft er auf Hindernisse, die nicht umfahren werden können - wie Stufen oder einen Gartenschlauch, kann er diese aufrecht auf zwei Beinen gehend überwinden. Möglich machen dies Gelenkkugeln, die gleichzeitig auch als Räder funktionieren.
Der bauchige Körper nimmt das ausgekratzte Material auf. Dieses wird in einem biologisch abbaubaren Beutel gesammelt und kann schließlich idealer Weise auf einem Kompost "ausgeschieden" werden.
21.05.2007
Das Funktionsprinzip
Das endgültige Funktionsprinzip sollte folgende Punkte/Unklarheiten berücksichtigen:
- hoher Kraftaufwand beim Auskratzen auf Druck oder Zug, ein gewisses Gewicht ist nötig
- Fugen sollten bis zur Endkante gereinigt werden können - Werkzeug muss sich also an der Front des Roboters befinden
- wenn die Fugen ausgekratzt und das Material aufgesaugt wird, bleiben leere Zwischenräume zurück, die ungünstigerweise wiederum idealer Unterschlupf für neue Samen sind
- wird das komplette ausgekratzte Material aufgenommen gibt es ein Stauplatz- bzw. Größenproblem - wie groß darf der Roboter sein? Ist es wirklich nötig, dass er das Material aufnimmt oder sollte der Mensch das Kehren übernehmen?
- wie bezieht der Roboter seine Energie?
- woran erkennt er die Grenzen seines "Arbeitsplatzes", also der Terrasse, wie werden angrenzende Blumen vorm Abschneiden geschützt?
Der Versuch einer Lösung
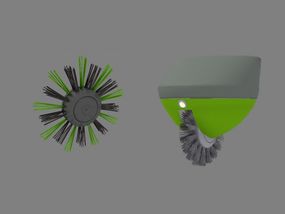
Ritzelbot arbeitet nach dem Prinzip der Mantis Gartenfräse, also mit einem motorangetriebenen Bürstenrad, welches über Rotation die Fugen auskratzt. Der Roboter sollte Sand und Erde von Pflanzen und Moos (Farberkennung) unterscheiden können und sein Bürstenrad so nur dann in die Ritze versenken, wenn es nötig ist.
Hinter der Fräse ist eine Aufsaugvorrichtung (ähnlich wie bei Rasenmähern) angebracht, welche dafür sorgt, dass Ritzelbot das ausgeschabte Material aufnimmt. Doch bevor es in seinem Bauch gelagert wird, wandert es über ein Rüttelsieb, welches Sand und Dreck von groben Pflanzenteilen trennt. Während ersteres über eine Trichterhilfe/Schiene wieder in die Fuge zurückgeführt wird, wandern die Pflanzenteile in einen Auffangbehälter, der von Ritzelbot bei Bedarf am Kompost oder einer anderen einstellbaren Stelle ausgekippt werden kann.
Ritzelbot kümmert sich aber auch um die Sauerei am Rand, die durch das rotierende Fräsrad unweigerlich entsteht. Ähnlich wie eine Straßenkehrmaschine besitzt er dafür zwei sich drehende Bürsten am hinteren Ende, die durch ihre Schrägstellung letzte Sandreste in die Fuge befördert.
Der Arbeitsprozess in Kurzfassung:
- Fugenauskratzen mittels Fräsprinzip
- Aufsaugen
- Aussieben (Rüttelsieb)
- Auffangen von Pflanzenteilen und Zurückführen von Sand/Erde in Fuge
- überstehende Dreckreste am Rand in Fuge kehren
- selbstständiges Entleeren des Pflanzenmaterials
22.05.2007
Das Funktionsprinzip in Frage gestellt
Bei einem so umfangreichen Roboter wie oben beschrieben, ergeben sich natürlich auch wieder neue Probleme:
- um alle Funktionen zu ermöglichen, muss Ritzelbot auch entsprechend groß sein, damit kann er zwar auch besser die nötige Kraft aufwenden, benötigt aber viel mehr Platz, kann sich also schlechter durch Hindernisse wie Terrassenmöbel (ein kleiner Roboter fährt einfach unter einem Stuhl durch) bewegen und kann auch sonst viel schwieriger manövrieren
- da er die entfernten Pflanzen aufnimmt - entsteht auch das Problem der Reinigung - gerade bei Regennässe eine Riesensauerei
- mit einem Fräßrad, was sich innerhalb der Fugen langbewegen soll, gibt es bei kurzen Fugen (Knochensteine) ein Problem, ein hakenähnliches Kratzwerkzeug bleibt also unumgänglich (eventuell als Austauschaufsatz)
Es stellt sich die Frage, ob es überhaupt nötig ist, dass Ritzelbot vom Auskratzen bis hin zum Entsorgen wirklich alles selber machen muss. Im Prinzip gibt es verschiedene Möglichkeiten:
Funktionsspanne Minimum - Maximum
Ein Roboter, der sich auf das wesentliche, das anstrengenste dieser Tätigkeit beschränkt. Also das Arbeiten in Bückhaltung übernimmt, sprich das reine Entfernen des Unkrauts. Lediglich mit einem Werkzeug ausgestattet könnte dieser Roboter ganz klein konstruiert sein. Das macht ihn wendiger sowie energie- und platzsparender. Man muss aber als Mensch selbst hinterherlaufen und das Grünzeug wegkehren. Ritzelbot würde dann also nicht eigenverantworlich losarbeiten, wenn es nötig ist, sondern auf Verlangen seines Besitzers, der sich für diese nervende Arbeit erst einmal Zeit nehmen muss. Außerdem ist Ritzelbot aufgrund seiner kleinen Körpermaße kräftemäßig nicht in der Lage zu harken. Kann also Pflanzen nur knapp über dem Boden abschneiden - so kommen sie ganz schnell wieder. Alles kein Problem, wenn Ritzelbot dann eben öfter seine Runde dreht. Da aber der Mensch auch am Arbeitsprozess beteiligt ist (außer, es stört einen nicht, wenn abgeschnittenes Gras überall rumfliegt) ist dies ein entscheidender Nachteil. Ein weiteres Problem des reinen Abschneidens: Moos, welches ja meist das größere Problem ist, wird, da es von Natur aus so kurz ist, nicht erfasst und kann sich so ungehindert auch auf den Steinen ausbreiten.
Die nächste Stufe ist ein Roboter, welcher das entfernte Material aufnimmt und eigenständig entsorgt. Dadurch erhöht sich seine Größe und sein Gewicht. Ein Auskratzen auf Zug ist möglich. Aber was passiert mit dem ausgekratzten Material? Wird es komplett aufgenommen, ergibt sich ein Stauplatzproblem und die Fuge bleibt leer (und bietet Ziel für neue Samen). Will man eine Trennung vermeiden (auwändig, platzfressend) bleibt diese Variante: Ritzelbot hat zwei Programme: entweder reines Abschneiden und Aufnehmen (sind ja dann nur Pflanzen) oder ein Auskratzen (inklusive Wurzeln) wobei das Material allerdings zum selber aufkehren liegen bleibt.
Die dritte Version des Roboters, die auch das Trennen und damit das Aufbewahren bzw. Rückführen des Materials übernimmt, ist die von mir bevorzugte. Hier ist es nun auch möglich, mal in den Urlaub zu fahren, oder wenn man ein Wochendhaus hat egal zu welcher Zeit an seiner Terrasse vorbeizukommen und es sieht immer gepflegt aus.
Dieser Roboter ist natürlich nicht das Ende der Palette, wenn man wöllte, könnte man Ritzelbot auch noch das Reinigen (Fegen, Wischen) der Terrassenfliesen übertragen, dies erfordert aber weitere Werkzeuge und damit eine Vergrößerung des Roboters, so dass man diese Aufgabe sicherlich eher einem weiteren Roboter (in nicht zufriedenstellender Version ja bereits vorhanden) oder dem Menschen selbst überlassen kann.
27.05.2007
Überarbeitung der Funktionsweise
- Zentrifuge www.liqui-filter.com
Im Prinzip bleibt die Funktionsweise wie oben beschrieben. Statt einem Rüttelsieb gibt es allerdings eine Zentrifuge, die schweres (Steine, Sand) von leichtem trennt (Pflanzen, Samen). Neben dem Fräsrad gibt es auch einen hakenartigen Kratzer, der bei kurzen Fugenstücken und hartnäckigen Wurzelpflanzen eingesetzt wird. Die Heraushebelwirkung (auf Zug) wird durch ein Abstoßen mit den Zehen (hinter dem Rad) verstärkt. Außerdem ist das Fräsrad beweglich gelagert, schräge Ritzen können so in einem Zug gereinigt werden, ohne dass der Roboter sich ständig mitdrehen muss. Das Bürsten des Fräsrades sind aus Nylon (zeichnet sich durch eine hohe Festigkeit, Steifigkeit und Zähigkeit aus), sind also ungefährlich für Natursteine und ähnliches.
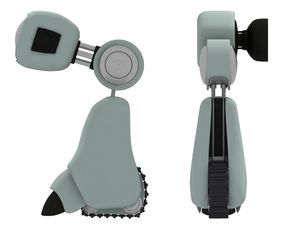
Die Räder des Roboters befinden sich am Fersengelenk. Können so beim Laufen durch die Zehenstellung arretiert werden. Auch bei Fahren, also während der Arbeit können die Zehen die Räder kurzzeitig arretieren um ein Abstoßen zu gewährleisten. Für eine optimale Stabilität, gerade beim Laufen, benötigt Ritzelbot wahrscheinlich vier Beine. Im Idealfall kann er seine Räder drehen und so quer (z.B. vor einer Hauswand) fahren.
Handling
Ritzelbot braucht einen trockenen Ort für seine Station, zu der er immer wieder zum Aufladen und Verweilen zurückkehrt. Vor dem allerersten Abrbeitsgang muss er angelernt werden. Er wird also auf den Terassenrand gesetzt, wobei er sich seine Position und die Härte/Höhe der Fliesen merkt. Danach wird ihm der Ort der Entsorgung (Kompost) gezeigt.
Alles weitere macht Ritzelbot von selbst, also sich selbst aufladen, die Terrassenfläche erkunden und die Fugen reinigen. Er richtet sich nach dem Wetter, fährt also nicht bei Regen oder regennassem Wetter raus (mehr Schmutz) und verringert seine Arbeitsfrequenz bei lange anhaltendem trockenen Wetter (da wächst auch weniger). Solange es noch keine optimalen Gehäuseoberflächen, die sich selbst reinigen gibt, sollte der Mensch von Zeit zu Zeit (Ritzelbot meldet sich) eine Reinigung vornehmen.
29.05.2007
Formsuche
Resultierend aus den Vorüberlegungen zu den Anforderungen und der Funktionsweise sollte Rizelbot folgende Eigenschaften und Bestandteile besitzen:
- bauchiger Körper für Motoren, Zentrifuge und Aufbewahrungsbox
- Kameras, die über den Körper hinausragen zum rechtzeitigen Erkennen von Pflanze, Platte und Fuge
- Bürstenrad und schwenkbarer Haken im vorderen Bauchbereich
- 2 oder mehr (stabiler) Beine, die sich dank integrierter Räder zum Fahrwerk umbauen können
- Füße zum abstoßen
In der Natur gibt es schöne Vorbilder für die Grundform des Ritzelbots. Besonders eignen sich Käferkörper oder die von Krabben und Krebsen. Letztere haben auch eine weitere interessante Eigenschaft: sie können seitwärts laufen. Dies könnte neben dem drehbaren Werkzeug helfen, auch schwierige Steinformen zu bearbeiten, ohne das Ritzelbot sich ständig neu ausrichten muss.
Hier sind Käfer zu sehen, welche sich durch ein kugeliges Aussehen auszeichnen.








Krabben und Krebse






01.06.2007
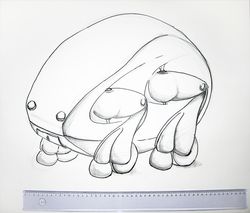
Skizzen
Erste Zeichnungen nach dem Anschauen der Naturformen.




08.06.2007
Gliedmaßen - Form und Anordnung



10.06.2007
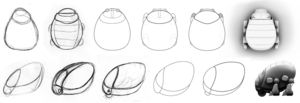
Körperform
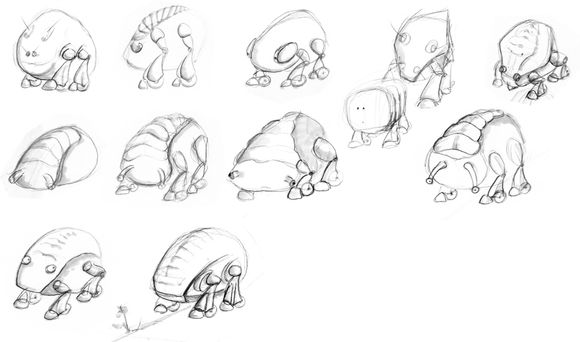
- Die unterste Reihe geht in Richtung Endform.

Schaummodell

- Volumenmodell Körper

1:1 Zeichnung
- Körperlänge = ca. 45 cm

14.06.2007
Ritzelbot bekommt einen Kopf - Überarbeitung von Form und Werkzeug
Bisher sollte das Kantenproblem (z.B. an Hauswänden) über ein Querstellung des Fahrwerks gelöst werden.
Besser ist aber ein auszieh- und schwenkbarer Werkzeugarm, der in seitlicher Stellung auch Kanten längs der Fahrtrichtung reinigen kann. Ein flexibler Arm kann besser an die jeweilige Kantensituation angepasst werde.
In Ritzelbots Fall ist dieser "Arm" gleichzeitig sein Kopf.
Eine weitere Neuerung: Statt der Räder befinden sich nun Ketten an den Füßen (siehe unterste Zeichnung).



Marienkäfer haben ein interessanten Körperbau. Wie Ritzelbot können sie mit ausgestreckten Beinen eine bodenferne Haltung einnehmen, sich aber auch dicht am Boden zusammenkauern...

- Quelle: www.naturlichtbild.de


Außerdem haben sie ein klare Kopf-Körper-Definierung. Sie können ihren Kopf in verschieden Winkel und Richtungen drehen und neigen.

- Quellen: www.naturlichtbild.de, www.buseck-online.de


Beginn 3D-Umsetzung
- Imageplane


- Erste Version