
Unterteilung von Robotern nach ihrem Aussehen oder nach ihrer Aufgabe
1 Industrieroboter
2 Serviceroboter
2.1 Haushaltroboter
2.1.1 Helfer
2.1.2 Überwacher
2.2 Spielzeugroboter
3 Erkundungsroboter
3.1 Drohnen/Kampfroboter
3.2 Rover/Lander
3.3 Aufklärung, Überwachung
3.4 Unterwasserroboter
3.4.1 ROVs
3.4.2 AUVs
4 Roboter in der Medizin
5 Humanoide Roboter
Zukunftsvisionen
>> Video: I see robots
1 Industrieroboter
- universelle, programmierbare Bearbeitungsmaschinen, in der Regel nicht mobil
- meist nur eines od. wenige Einsatzgebiete
- 1961 erstmals bei General Motors in Produktionslinien eingesetzt
- anfangs vergleichsweise dumme Maschinen aus Stahl aber entscheidende Innovation in Produktion
- an Betriebsfront eingesetzt eroberten sie langsam Fabrikhallen heut nicht mehr wegzudenken
- Struktur beinhaltet
- Steuerung (Bewegung und Aktion, Voraussetzung Programmierung)
- Antrieb (bewegt Glieder),
- interne Sensorik (gleicht zw. Soll- u. Ist-Position ab, z.B. Drehgeber, Interferenzmuster oder Lichtschrankenfunktionen)
- Kinematik (schafft räuml. Zuordnung zw. Werkzeug u. Werkstück)
- Greifsysteme (stellen Verbindung zw. Werkstück u. IR her)
- externe Sensorik (Rückmeldung über Umgebung, ermöglicht flexible Reaktion auf nicht geplante Veränderungen, zum Beispiel Bildverarbeitungssysteme, Lichtschrankenfunktionen und Ultraschallsensoren)
- einmal programmiert läuft Arbeitsablauf autonom und ist durch Sensoren geringfügig variierbar
- Technologieentwicklungen in Sensorik und Steuerungstechnik gaben mehr Flexibilität (Roboter konnten sich auf Produktvarianten und Umgebung selber einstellen)
Unterscheidung anhand verwendeter Kinematik
(Bewegung v. Pkt. und Körpern im Raum)

serielle Kinematik
- vorwiegend Gelenkarmroboter, Bsp. KUKA Gelenkarmroboter zur Werkstückver- und entsorgung an einer Fräsmaschine, Schweißroboter von der Firma ABB (Automobilbranche nach wie vor größter Roboterverbraucher weltweit)
- und Portalroboter zum Automatisieren von Werkzeugmaschinen (Messtechnik, )


parallele Kinematik
- Hexapod (6Füßer) bei Flugsimulatoren
2 Serviceroboter
2 Serviceroboter
In den 80ern kam es dann durch neue Fähigkeiten zu ersten Anwendungen außerhalb der Produktion der Serviceroboter war geboren.
- sind frei programmierbare Bewegungseinrichtungen, die teil- oder vollautomatisch Dienstleistungen verrichten
- v.a. im Einsatz wenn Arbeit für Menschen unangenehm oder gar gefährlich (Fassadenreinigung SIRIUSc, Reinigung u. Inspektion v. Rohrleitungen, Prüfung v. Kernkraftwerken Bild)
- nicht nur in Industrie, auch im Haushaltsbereich (nicht Pflegepersonal ersetzen, aber Hol-, Bringe- und Überwachdienste in gewohnten Umgebung sichern)


2.1.1 Helfer
- arbeiten selbstständig im Haushalt
- Vorfahren Staubsauger und Rasenmäher
- Reinigungsleistung + entsprechende sensorische sowie motorische Fähigkeiten (da Ort ständig anders)
- Hindernisse durch Breitband-Ultraschallsender u. Ultraschallempfänger, Magnetstreifen begrenzt Aktionsraum, Akkus werden an Dockingstation geladen
- Staubsaugroboter Roomba von iRobot 2002
- Armar, geschickter Haushaltsroboter, gießt sogar Grünpflanzen, Zweiarmsystem, mit Torso, Kopf und mobiler Plattform


- Rasenmähroboter (Solarbetrieb Solar Mower)
- Fensterreinigungsroboter (Raccoon erster vollautomatischer Fensterreinigungsroboter vom Fraunhofer 2002, zickzack über Scheibe von li unten nach re unten, über passive Saugnäpfe)



- Care-O-bot II 2002, holt auch Bier einfache Befehle + Greifarm (schwenkbarer Kopf mit Kameras und Laserscanner, Datenbank mit Objekteigenschaften und Handlungsplaner, an Hand weiteres Kamerasystem um Griff zu überwachen und zu präzisieren, Bedienung über abnehmbares Funkpanel mit Touchscreen, Mikro für Sprachbefehle)
- autonome mobile Roboter als Museumsführer, seit März 2000 in Berlin Museum für Kommunikation, können Umwelt wahrnehmen und entsprechend reagieren, unterschiedliche Reaktionsmuster 3 Charaktere, ein Animierer, Erzähler, Spieler
- im Sept. 2003 kam dann nächste Generation autonomer Ausstellungsroboter, Pärchen Mona und Oskar, ausgeprägtere, spürbare Charaktere für Opelimage

- Quellen:


- Quelle: peopleandrobots.org
- Schnittstelle Mensch Haushaltsgerät, für Senioren, Bedarf an Hilfsgeräten die kommunizieren, Bsp. Pearl

- www.pro-4-pro.com
2.1.2 Überwacher
Mosro mobiler Wächter, erster serienreifer Sicherheitsroboter (programmierbare Sensoren: 240 versch. Bewegung, Rauch, Geruch, Mikro, Kamera, über Funk, ISDN od. GSM mit Einsatzzentrale verbunden, Personen über 24 mögl. Sprachen aufgefordert sich über Fingerabdruck zu identifizieren, wenn nicht Alarm opt. u. akustisch)

2.2 Spielzeugroboter
- automatisierte Funktionen keinerlei arbeits- od. forschungstechnischen Nutzen
- 1998 Furby Hightech-Plüschtier, Tiger Electronics, verfügt über künstl. Intelligenz,
kann sich mitteilen, singt, küsst, tanzt und beschwert sich bei Vernachlässigung - Hund ähnliche Lauf- und Spielroboter Aibo von Sony (ursprüngliche Ziel Haustierersatz für Allergiker) Unterhaltungsroboter, Nov. 2003 3. Aibogeneration, programmierbares Hirn, laufen, aufstehen, Kopf mit Kamera, Infrarotsensoren, Mikrofonen u. Motoren um hoch, runter u. seitwärts zu bewegen, Drucksensor unterscheidet Berührung, Beschleunigungsmesser, Temperaturfühler, Ein- und Ausschalter

>> Video: aibo von sony
- Pleo Babybrontosaurier mit 38 Sensoren um Licht, Bewegung, Berührung und Sound zu erkennen
- PaPeRo von NEC realistischer Vierbeiner zum Zeitvertreib 2001, Umgebung über 2 CCD-Kameras, dadurch Bahnplanung, Streichelsensor, Tadelsensor, Gesichtserkennung (Beziehungsverbesserung), Ortungsmikros für Suche nach Personen
- Roboter als programmierbare Bausätze Lego MindStorms Ende 1998 in USA


3 Erkundungsroboter
an Orten die für Menschen (lebens-)gefährlich oder unzugänglich
wie militär. Konfliktgebiete, oder gar andere Himmelskörper (Mond, Mars
)
operieren ferngesteuert oder autark in Wissenschaft od. Militär

3.1 Drohnen/Kampfroboter
- zu Aufklärungszwecken (Global Hawk U.S. Airforce)

- Quellen:

3.2 Rover/Lander
- Rover - Roboter die sich mobil auf Oberfläche anderer Himmelskörper bewegen (sowj. Lunokhod 1970 auf Mond)
- Lander - nichtmobile Raumsonde zur Forschung (Viking Lander für Mars)

3.3 Aufklärung, Überwachung
- Bsp. Marvin - das fliegende Auge für Sucheinsätze, Aufklärung, Überwachung od. Erfassung und Vermessung, autonom fliegender Hubschrauber der EADS GmbH, Bordcomputer hält stabil in Luft, erkennt Gegenstände, trifft Entscheidungen und liefert Bilder an Bodenstation, zur Navigation2 GPS-Empfänger, Ultraschallsensoren u. Infrarotsensoren
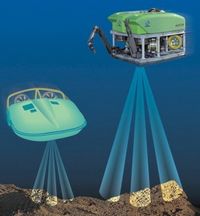
3.4 spezial Unterwasserrobotik
3.4.1 ROVs
- ferngesteuerte Unterwasserrboter, durch Kabel mit Mutterschiff an Wasseroberfläche verbunden, da auch Steuerungseinheit, mit Greifarmen und Sensorik Wartungs-, Reparatur- und Installationsarbeiten
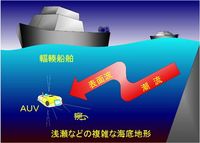
3.4.2 AUVs
- ohne Nabelschnur, Energieversorgung an Bord, in Bereich Kartographie, Spionagemissionen, Umweltdaten unter Wasser


4 Roboter in der Medizin
- hochpräzise Werkzeuge, Minimalinvasive Chirurgie
- OP-Roboter da Vinci, bei Endoskopie (eine Kamera, 2 Gelenkarme an denen Instrumente Vorteile bessere Haltung für Chirurg, Vergrößerungen, filtern Zittern)
- Präzisionschirurgie SCALPP ist automatisiertes Schneidesystem für Entnahme von haut bei Verbrennungen (regelmäßig geformter Hautlappen von absolut gleich bleibender Dicke)
- Mikroroboter die Medikamente durch Körper an Wirkstelle bringen od. selbstständig Eingriffe ausführen noch Vision
5 Humanoide Roboter
- Menschenabbilder (wenn Erscheinungsbild vertraut Mensch aufgeschlossener, akzeptiert sie in alltägl. Umfeld)
- Bild maßgeblich durch die Erzählungen Isaac Asimovs in den 40er Jahren des 20. Jahrhunderts geprägt
- lange Zeit technisch nicht realisierbar
- sollen autonom in ihrer Umwelt agieren und möglichst auch interagieren können, wobei ihre Mobilität durch zwei Beine als Fortbewegungsmittel beschränkt ist, durch 2 künstl. Arme und Hände Arbeiten verrichten
- Unterstützung im Haushalt, Pflege älterer Menschen od. nur zur Unterhaltung der Familie
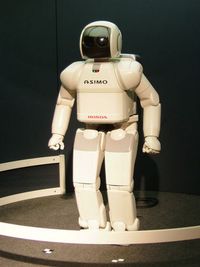
- seit 2000 ASIMO von Honda, grundlegenden Probleme gelöst (auf 2 Beinen, Bewegung die menschl. Gang entspricht, am weitesten fortgeschritten, Treppen od. Neigungen kein Hindernis, Über Spracheingabe geführt, kann Personen indentifizieren und per Gestik kommandiert werden, bis zu 40 min. Betriebzeit, 1,30 m 54 kg, 2,7 km/h, 1,8 wenn er was trägt, heute schon mit 6km/h rennen), gilt als Vorbote für Roboter nach menschl. Maß
>> Video: ASIMO

>> Video: Qrio
- Bsp. Qrio von Sony erstmals 2000, neuester Prototyp eines Entertainmentroboters, nicht für Handel, nur Repräsentation Sony Produkte + dynamischer Gang (verlagert bei jedem Schritt Schwerpunkt), balancieren, Hüpfen, Treppensteigen, Fußballspielen, Geschichtenvorlesen, Singen, dazu Tanzen und vieles mehr, japan. Wortschatz von 60.000 Wörtern, durch 2 Kameraaugen und Mikros Personen optisch u. akustisch unterscheiden, Worterkennung einfacher Dialog, stellt auch Fragen

fehlen nur noch Haut, wache Augen, elegante Bewegungen und Emotionen
- erste Haut aus Silikon mit piezoelektrischer Folie zum Fühlen bei Robovie IIS aus Japan
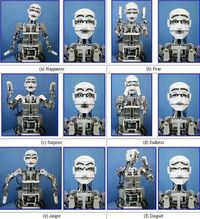
- Frauenkopf (WE-4R) der Freude, Wut, Traurigkeit u. Überraschung ausdrückt von Fumio Hara Uni Tokio
>> Video: Kismet
- Kismet, nur Kopf, hat Bedürfnisse und strebt nach deren Befriedigung, kann dabei Freude, Traurigkeit u. Frustration ausdrücken, von Cynthia Breazeal Massachusetts