
Die Geschichte der Roboter
Nach der Definition des Robot Institute of America von 1979 ist ein Roboter ein umprogrammierbares, multifunktionales Manipulationswerkzeug, das dazu dient, Materialien, Teile, Werkzeuge oder spezialisierte Geräte anhand verschiedener vorprogrammierter Bewegungsabläufe zu bewegen, um eine Reihe an Aufgaben zu erledigen.
Oder anders: Roboter sind stationäre oder mobile Maschinen, die von einem hochleistungsfähigen Computerprogramm festgelegte Aufgaben erfüllen ein komplexes System also, das in der Lage ist, Informationen in durchdachte Handlungen umzusetzen.
Der Traum von der Automatisierung von Arbeitsvorgängen durch den Einsatz von Robotern reicht weit über zweitausend Jahre zurück und spiegelt sich bereits in einem Zitat von Aristoteles wider, in dem dieser über Werkzeuge philosophiert, die ihre eigene Arbeit ohne menschliche Hilfe verrichten: "Wenn jedes Werkzeug auf Geheiß, oder auch vorausahnend, das ihm zukommende Werk verrichten könnte, ..., so bedürfte es weder für den Werkmeister der Gehilfen, noch für die Herren der Sklaven.". In Erfüllung geht dieser Traum vom eigenständig arbeitenden Werkzeug trotz früher Vordenker nur schrittweise in den letzten Jahrzehnten.
Vorgänger der Roboter
Die Phasen auf dem Weg zur Entwicklung der Roboter
01 Bewegliche Masken und Statuen in der Antike
Durch einfache mechanische Prinzipien (über Hebel und Schallrohre), wurde die Illusion von sich bewegenden und sprechenden Götter- und Orakelfiguren erzeugt. Diesefalschen Wunder, besaßen eine versteckte Automatik und dienten dazu, die Menschen zu beeindrucken. Priester nutzen sie, um ihre Machtposition gegenüber dem Volk und den Herrschenden zu verstärken.
Z.B. Anubis (2000 v. Chr.), der Ägyptische Totengott und Schutzgott der Totenstätten. Denselben Zweck erfüllten auch die Tempeltüren des Heron (um 100v.Chr.). Mittels Dampfkraft konnten sie sich wie selbständig öffnen. Sehr beeindruckend damals.

- Anubis, Quelle: www.digital-images.net
- Tempeltüren des Heron, Quelle: www-srt.uni-paderborn.de
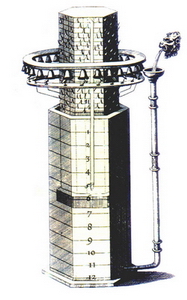
- Wasseruhr des Ktesibios
02 Uhren
Die Beherrschung der Zeit ist von grundlegender Bedeutung große Rolle in der Geschichte der Roboter nur sie erlaubt perfekte Koordination der maschinellen Abläufe.
Ein wichtiges Beispiel ist die Wasseruhr des Ktesibios von Alexandria (296 228 v.Chr.)
oder die Wasseruhren von al-Jazari Uhren mit Vögeln, aus deren Schnäbeln Kugeln fielen, dies ließen Becken oder Trompeten künstlicher Musiker erklingen oder öffneten Türen, hinter denen menschliche Silhouetten sichtbar wurden.
Ähnlich wie bei den mittelalterlichen Stundenschlägern mit ihren Blei- oder Gusseisenfiguren in großen Turmuhren.
Nach 1500 Uhren werden immer präziser und kleiner. Angetrieben von dem Bedürfnis nach immer kleineren und genaueren Uhren wird die Feinmechanik in den folgenden Jahrzehnten immer weiter entwickelt.
03 Automaten
Zunächst als Zeitvertreib gedacht, entstehen Unterhaltungsmaschinen, die immer verblüffendere, roboterartige Fähigkeiten erhalten damit die Gesellschaft beeindruckten.
Anfänglich auf den Prinzipien der Mechanik beruhend ähneln sie Mensch oder Tier und konnten vorher festgelegte Handlungsabläufe durchführen. Aber im Gegensatz zu Robotern waren sie unfähig Signale von außen wahrzunehmen.
Der Begriff Automat ist übrigens eine Ableitung vom griechischen Wort automatos aus eigenem Antrieb.
Die Mechanische Ente von Jaques de Vaucanson ist ein Beispiel für den Erfindungsreichtum dieser Zeit. Die Ente konnte quacken, mit den Flügeln schlagen und das Fressen und Trinken simulieren.
Unbedingt erwähnenswert auch die drei Automaten in menschlicher Gestalt des Schweizer Uhrmachers Pierre Jaquet-Droz und seinem Sohn: ein Cembalo-spielendes Mädchen, ein zeichnender Künstler und ein Schreiber die ersten Androiden.

- Cembalospielerin vonPierre Jaquet-Droz, Quelle: www.museumspeelklok.nl
- Vaucansons Ente, Quelle: www.macalester.edu
Auch in der Industrie wurden zunehmend Automaten verwendet. Die Webmaschine von J. Jacquard hatte eine mechanische Lochkarten-Steuerung. Die Maschine konnte mechanisch diesen Löcher-Code entziffern und somit beliebig neue Muster weben ohne das die Maschine umgebaut werden musste.
Dies stellt somit einen Vorläufer der Programmierung eines Automaten, also eines Roboters dar.

- Joseph Marie Jacquard und sein Webstuhl mit Lochkarten-Steuerung
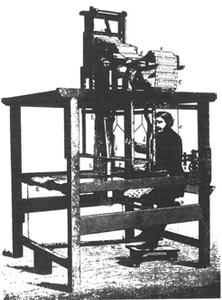
- Quellen: en.wikipedia.org, www.tiszaparti.hu

- Prometheus, Quelle: missmax.com
Geschichten und Ideen von Roboter-Wesen
Aber bis der erste Roboter erschaffen wurde sollte es noch eine Weile dauern. Aber in der Fiktion gab es sie jedoch schon vor langen Zeiten.
Drei Geschichten der alten Griechen und Juden über künstliche Wesen sind die Grundlage vieler Romane, Gedichte und Filme über Roboter-Wesen bis in die heutige Zeit:
01 Titan Prometheus ein griechischer Mythos - erschuf die Menschen aus Lehm und brachte ihnen gegen den Willen des Zeus das Feuer. Zur Strafe wurde er an einen Felsen gefesselt, wo ein monströser Adler seine sich stets erneuernde Leber fraß, bis Herakles den Adler mit Zeus' Zustimmung tötete.

- Hephaistos, Quelle: www.koxkollum.nl
02 Hephaistos (ab 750 v. Chr.)
Der griechische Gott Hephaistoshatte als Schmied die wichtige Fähigkeit, aus Metall alle möglichen selbsttätigen Roboter-Wesen herzustellen:
- Talos, den riesigen Kampf-und Wach-Roter,
- Zwei Dienerinnen aus Gold
- Feuerspeiende Pferde und Bullen, Wachhunde, Selbstfahrende Dreiräder
All diese Roboter-Wesen waren auf bestimmte Missionen "programmiert" und erfüllten diese selbstständig. Daher auch die griechisch Bezeichnung "Automatoi" - sich selbst bewegend.

- Der Golem, Quelle: web.tiscali.it
03 Der Golem des Rabbi Löw (400 v. Chr.).
Eine Sage, deren Ursprung schon auf die jüdische Kabbala (Sammlung von mystischem Wissen) im Jahr 400 vor Christus zurückgeht.
Im Jahre 1580 schuf der Hohe Rabbi Jehuda Löwe ben Bezalel im jüdischen Ghetto von Prag einen Golem, eine aus Lehm geformte menschliche Gestalt.
Diese erweckte er zum Leben. Er steckte einen Pergamentstreifen, beschrieben mit verschlüsselten Buchstabenkombinationen und dem Namen Gottes, in eine kleine Öffnung am Hinterkopf des Golem. Dadurch wurde er gegen seinen Willen ein dienstbarer Knecht, der alle möglichen lästigen Arbeiten verrichtete: Wasser holen, Holz spalten und so fort.
Doch war der Golem nicht ohne Fehler. Vieles, was er anfasste, misslang. Er überschwemmte beim Wasser holen das ganze Haus und beim Holz hacken traf er Menschen und verletzte sie. Schließlich geriet der Golem dem Rabbi ganz außer Kontrolle und zerstörte halb Prag.
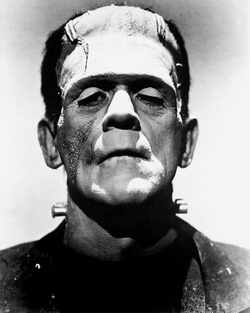
- Frankenstein, Quelle: www.doctormacro.com
1774 greift z.B. Goethe den Mythos von Prometheus auf und verarbeitet diesen zu einem Gedicht.
"Hier sitz' ich, forme Menschen
Nach meinem Bilde,
Ein Geschlecht, das mir gleich sei,
Zu leiden, weinen,
Genießen und zu freuen sich,
Und dein nicht zu achten,
Wie ich."
1818 erscheint der Roman: Frankenstein, oder der moderne Prometheus" von Mary Shelley. Auch hier wird der Mythos von Prometheus in moderner Weise naturwissenschaftlich-technisch wieder aufgegriffen. Dr. Frankenstein erschafft seinen künstlichen Menschen aus Leichenteilen. 1915 gibt es mit dem Roman "Der Golem" von Gustav Meyrink eine Neuauflage und zugleich Fortsetzung der alten Golemsage.
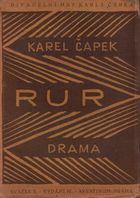
- R.U.R. von Karel Ĉapek, Quellen: www.bibliograf.cz

Der tschechische Autor Karel Capek prägt schließlich den entscheidenden Begriff Roboter. Das Wort wird erstmalig 1921 in seinem Theaterstück "R.U.R." (Rossum's Universal Robots) verwendet. Abgeleitet ist die Bezeichnung von dem tschechischen Wort "robota", das sich mit Zwangsarbeit übersetzen lässt. Karel Ĉapek nannte so Maschinenmenschen, die in Tanks herangezüchtet wurden, um an Stelle von Menschen in der Industrie zu arbeiten. Mit "Robotern" sind also elektro-mechanische Automaten gemeint, die, wie Sklaven, gegen ihren Willen die Arbeit für die Menschen erledigen. Schnell hielt die Wortschöpfung "Roboter" Einzug in viele Sprachen.
Mit den Robotern machte der Mensch seinen Traum von einer untertänigen Kreatur wahr, einem anspruchlosen Diener, der unangenehme Aufgaben übernimmt oder als Aufklärer den Entdeckerdrang der Menschen unterstützt, ohne dass diese sich selbst in Gefahr begeben müssen.

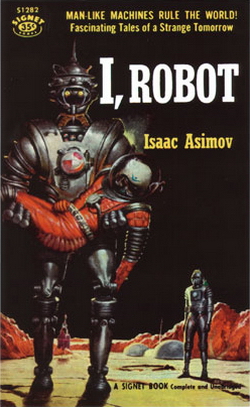
- Issac Asimov und seine Erzählsammlung "I, robot", Quellen: de.wikipedia.org
R.U.R., Metropolis, Frankenstein
Die ersten künstlichen Wesen, die die Science-Fiction-Literatur hervorbrachte, wurden zumeist als Geistesgestörte dargestellt, die nur von einem besessen war: ohne Skrupel dem Menschen, ihrem Schöpfer die Vorherrschaft zu entreißen, sich der Zivilisation zu bemächtigen und die Menschheit zu unterwerfen.
Dies ließ Roboter in keinem guten Licht erscheinen. Erst der Science-Fiction-Autor Issac Asimov bemühte sich mit seinen unzähligen Geschichten das schlechte Image der Roboter loszuwerden und entwickelt dabei die drei Robotergesetze (in der Erzählung Runabout, aus dem Erzählungs-Sammelband I, Robot 1942).
Da ein Roboter niemals ein Bewusstsein erlangen kann, bleibt er immer fehlbar und manipulierbar, auch von perversen Geistern. Schließlich genügt schon ein kleiner Softwarefehler, um den leistungsfähigsten Roboter aus der Bahn zu werfen und ihn Handlungen zu veranlassen, die seine Schöpfer niemals wollten. Und so verkündet Asimov: der Mensch behält die Oberhand! Dazu muss er den Roboter nur so programmieren, dass dieser den Menschen zu respektieren und seinen Schöpfer zu schützen hat, sollte er in Gefahr sein. Daher also die Aufstellung folgender Gesetze der Robotik:
01 Ein Roboter darf kein menschliches Wesen verletzen oder durch Untätigkeit gestatten, dass einem menschlichen Wesen Schaden zugefügt wird.
02 Ein Roboter muss dem ihm von einem Menschen gegebenen Befehl gehorchen, es sei denn, ein solcher Befehl würde mit Regel Eins kollidieren.
03 Ein Roboter muss seine Existenz beschützen, solange dieser Schutz nicht mit Regel Eins oder Zwei kollidiert.
Später (1985) lässt Asimov in Das Galaktische Imperium das sog. Nullte Robotergesetz entwickeln:
00 Ein Roboter darf der Menschheit keinen Schaden zufügen oder durch seine Untätigkeit gestatten, dass die Menschheit zu Schaden kommt.
So hat die Menschheit als Ganzes Vorrang vor der Verhinderung von Schaden an einzelnen Individuen."
Durch Asimov werden Roboter und der Begriff Robotik in den 40er Jahren erst richtig populär. Weitere Geschichten diverser Autoren entstehen. Während Roboter ein fester Bestandteil fiktiver Welten werden, kommen sie jedoch in der Realität erst ungefähr zwanzig Jahre später zum Einsatz.
Die ersten Roboter
1928 wird der erste elektromechanische Roboter in England von den Erfindern Captain Rickards und AH Renfell bei der Maschinenausstellung in London vorgestellt.
Er wurde mit Elektromotoren, Elektromagneten, Hebeln und Rädern betrieben. Besonders funktionstüchtig war dieses Exemplar allerdings nicht.
Elektra und Sparko (1940) wurden von der Westinghouse Electric Corp. gebaut und auf der Weltausstellung in New York präsentiert. Es waren die ersten elektromechanischen Roboter, die sich voll bewegen konnten. Elektra konnte tanzen, bis zehn zählen und rauchen. Sparko, der Hund, konnte auf den Hinterbeinen stehen und bellen.
1948 entwickelt John Hopkins The Beast, es war der erste mobiler Roboter.
Elsie & Elmer (1949) von Grey Walter waren ausgerüstet mit Rädern und Motoren, die durch sehr einfache Elektronische Schaltung und zwei Röhren-Transistoren gesteuert wurden. Das besondere aber war, dass sie sich orientieren konnten - ein Problem bei der Entwicklung von sich selbständig bewegenden Maschinen. Mit Hilfe von Fotozellen, die das Erkennen von Helligkeitsunterschieden ermöglichten konnten Elsie und Elmer konnten dadurch erstmals die Lichtquelle orten, die ihre Ladestation markierte.
- Elektra und Sparko (1940) und The Beast (1948) und Elsie & Elmer (1949), Quellen: www.robowelt.de

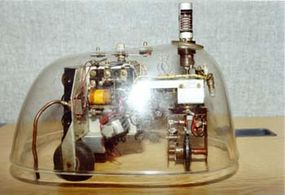
- Elsie & Elmer (1949), Quellen: www.robowelt.de
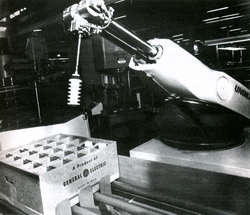
- Unimate (1961), Quelle: www.ecampustoday.com.hk
Neben diesen Entwicklungen waren die Roboter der ersten Generation doch vor allem Industrieroboter. Allesamt Gelenkarme die nur eingeschränkte Funktionen wie Schweiß- oder Lackierarbeiten am Fließband in der Automobilbranche übernahmen.
Erster Industrieroboter:
Unimate (iniversal automation) von George Devol 1961 nach Gesprächen mit Joseph F. Engelberger über die Romane Asimovs entwickelt.
Industrieroboter am Fließband bei General Motors, 1,5 Tonnen schwerer Gelenkarm konnte bis zu 150 kg schweres Gusseisen bewegen. UNIMATE arbeitete mit Computer-Speicher und programmierbarer Computer-Steuerung. Somit konnte der Roboter für alle möglichen Zwecke universell programmiert werden und diese automatisch ausführen. (Universal Automation = UNIMATE, der Name der späteren ersten Roboter-Firma der Welt)
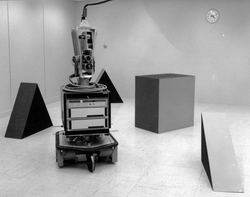
- Shakey (1966), Quelle: www.ai.sri.com
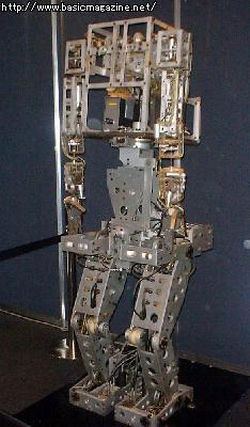
- Wabot-1 (1973), Quelle: basicmagazine.homeip.net
- Wabot-2 (1985), Quelle: www.techinfo.rwth-aachen.de
Die Visionen von Schriftstellern wie Asimov führten dazu, dass man mehr erwartete als eintönige Industriearbeiten.
Shakey (1966) (Artificial Intelligence Center des Stanford Research Institutes) der erste autonome und bewegliche Roboter keine Schönheit. Er hatte eine große dreh- und schwenkbare Kamera als Kopf, einen riesigen Computer als Körper und eine dreirädrige Plattform. Er bewegte sich selbstständig, brauchte dafür aber eine gute Stunde Rechenzeit. Sein Name der Geschüttelte bezog sich auf seine ruckartigen Bewegungen. Aber er konnte sich aus eigenem Antrieb bewegen, weil er seine Umwelt mit Hilfe mehrerer Sensoren wahrnahm: durch Kamera, Entfernungsmesser und taktile Sensoren zur Wahrnehmung von Hindernissen. Er konnte einen Gegenstand von einem Raum in einen anderen bringen ein durchaus beachtlicher Fortschritt
Mitte 1970er wurde der erste Mikrocomputer gebaut letzter Baustein für moderne Roboter. Für Roboter mit künstlicher Intelligenz. Ein wahrlich entscheidender Unterschied zum Automat. Roboter konnten nun Arbeiten erledigen und sich dabei ohne menschliche Eingriffe weiterentwickeln.
Der erste intelligente Humanoide war Wabot-1 (1973) in der Universität Waseda in Japan entwickelt, der ersteRoboter-Mensch, der gehen konnte. Er hatte einen Microcomputer zur Steuerung der Gliedmaßen, konnte einfache Gespräche auf Japanisch führen, Entfernungen zu Hindernissen mit Sensoren messen, besaß also eine visuelle Wahrnehmungsfähigkeit, hatte Augen, Ohren und einen künstlichen Mund und konnte mit Händen Gegenstände greifen und fühlen (mit Berührungssensoren)
Da Roboter ihre Umwelt wahrnahmen und Züge von Intelligenz besaßen veränderte sich ihre Rolle Einsatz als Helfer, für Forschung und für Sicherheit